5.9
Způsoby řízení kompenzačního výkonu
V praxi se velikost potřebného kompenzačního výkonu stále mění dle aktuálního stavu provozu. Je velmi důležité, aby byl kompenzační výkon dodán rychle. Kompenzace účiníku se v současnosti provádí pomocí kontroléru řízeného mikroprocesorem, který vyhodnocuje fázový posun φ mezi napětím a proudem. Z něj lze určit aktuální velikost účiníku. Vyhodnocení je rychlé, obvykle během několika cyklů sítě. Momentální velikost účiníku se porovná s požadovanou velikostí a připojí se dílčí kapacitorový blok, přičemž je tento postup opakován až do dosažení cílové hodnoty účiníku cos φK.
Používá se buď stupňovité řízení, nebo řízení plynulé.
5.9.1
Stupňovitě řízené kompenzátory
Celkový kompenzační výkon se rozdělí do stupňů a jejich spínání řídí regulátor jalového výkonu. Důležité je správně stanovit počet a velikost stupňů, což závisí na celkovém potřebném kompenzačním výkonu a na požadovaném účiníku. Tyto kompenzátory je možné spínat dvěma způsoby:
- Kontaktně, kdy se ke spínání používají klasické stykače, které mají hlavní kontakty dimenzované na spínání kapacitních proudů. Podle povelů regulátoru jalového výkonu přímo přepínají kondenzátory nebo chráněné kompenzační sekce. Při spínání stykačů ovšem mohou vznikat proudové rázy (až třicetinásobky jmenovitého proudu), a v důsledku toho přechodové děje. Používají se v sítích, kde se nevyskytují harmonické složky proudu a nejsou kladeny vysoké nároky na rychlost kompenzace.
- Bezkontaktně, kde se místo stykačů používají polovodičové bezkontaktní spínače tvořené antiparalelně zapojenými tyristory. Doba reakce těchto spínačů je velmi krátká (20 ms).
Pro omezení přechodového děje se do série s kompenzačním kondenzátorem připojuje ochranná tlumivka, pak hovoříme o chráněném kondenzátoru. Přidáním tlumivky vlastně zabráníme vzniku rezonance mezi kompenzačním kondenzátorem a reaktancí sítě. Pokud by se rezonanční kmitočet blížil frekvenci některé vyšší harmonické v síti, mohlo by v místě připojení kompenzačního prostředku dojít k výrazné deformaci napětí a k přetížení kompenzačního kondenzátoru. Připojením tlumivky vlastně dojde k přeladění na jiný kmitočet, který se již nebude shodovat s kmitočtem vyšší harmonické v síti.
5.9.2
Plynule řízené kompenzátory
Plynule řízené kompenzační filtry představují již dokonalejší kompenzační prostředky. Mohou být aktivní, nebo pasivní.
- Plynule řízené pasivní kompenzátory se provádějí obvykle s dekompenzačními členy. Kompenzátor se skládá z filtračně-kompenzační části, což jsou kompenzační obvody (filtry) LC, a dekompenzační části, kterou tvoří tlumivka řízená tyristory v antiparalelním zapojení, viz obr. 51. Filtry jsou naladěné na určitou frekvenci, takže nelze velikost jalového výkonu, který dodávají, měnit změnou kapacity, protože by došlo k rozladění LC obvodu. Dodávají tedy určitý stálý jalový výkon a přitom ještě filtrují vyšší harmonické. Kompenzační výkon se ovlivňuje tlumivkou. Tyto kompenzátory se používají tam, kde se kompenzační výkon velmi rychle mění, např. u bodových svařovacích automatů.
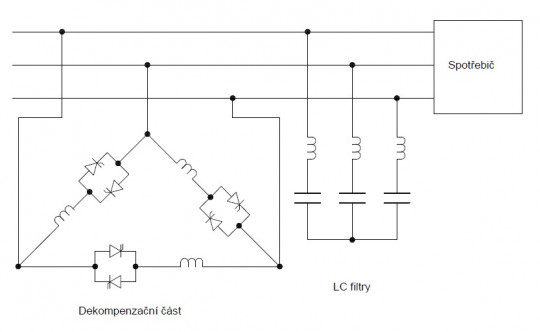
Obr. 51. Plynule řízené kompenzační filtry s dekompenzační částí
- Plynule řízené aktivní kompenzátory se používají nejenom pro kompenzaci jalového výkonu, ale i deformačního výkonu (vyšší harmonické). Umí i snížit kolísání napětí a potlačit zkreslení napětí vyššími harmonickými. Využívají řízené střídače s pulsně šířkovou modulací, takže mohou vytvořit průběh libovolného tvaru dle aktuální potřeby. Kompenzační systémy pracující v reálném čase se označují RTRPC (Real Time Reactive Power Compensation). Využívají elektronické spínací prvky, které mohou připojovat různé velikosti kapacit bez vytváření přechodových jevů a přepěťových špiček.
Souhrn
Kompenzace jalového výkonu a účiníku je významnou součástí elektroenergetiky, protože vede ke snižování ztrát při přenosu energie a k úsporám celkové energie. V průmyslu se používá paralelní kompenzace pomocí kapacitního jalového výkonu. Jako kompenzační prostředky je možné využívat kondenzátory, hrazené sekce, filtry LC a některé točivé elektrické stroje.
Velmi významná je též problematika regulace jalového výkonu. Nejvýhodnější se jeví systémy pracující v reálném čase.